- ドライビングシミュレータ
- シミュレーターシステム
特長
車両ダイナミクスのステアリング反力データに基づき、反力制御、ステアリングモデル構築が可能です。
- 省スペース設計のため、机上での実験が可能
- 高精度・低コギングトルクの制御を実現
- 100V 電源に対応
- 数値解析ソフトウェアによる制御モデル構築が可能
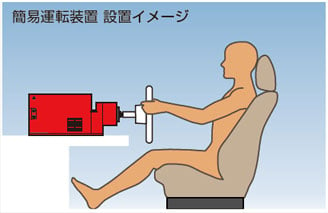
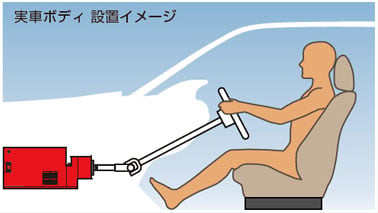
- 簡易運転装置から実車ボディを使用した運転装置への搭載まで対応可能
機能
- 操舵反力トルクを発生
コアレス型ダイレクトドライブAC サーボモータを使用し、高精度・低コギングトルクの制御を実現します。 - 操舵反力トルクを常時計測
AC サーボモータにより発生し、出力軸に伝達される操舵反力トルクを常時計測します。高精度・高応答のトルクセンサを使用し、動的なトルク変動を正確に計測します。 - 操舵反力トルクの伝達
装置に接続される任意のステアリングコラム部へ操舵反力トルクを伝達します。軸端には接続のためのセレーション加工を施します。
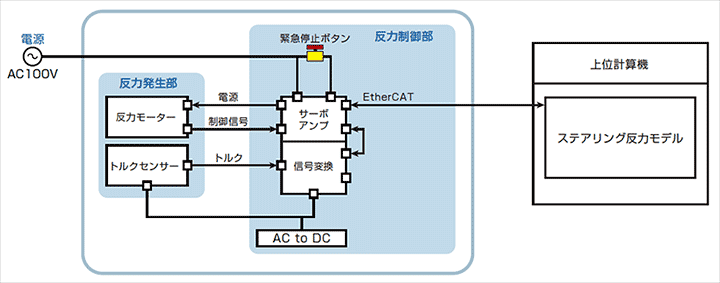
システム構成図
- 上位制御系からのトルク指令に基づき、AC サーボモータにより操舵反力トルクを発生します。
- 操舵反力トルクは本装置の出力軸に接続された任意のステアリングコラム部へ伝達されます。
- 本装置により発生するトルクの値はトルクセンサにより常時計測され出力されます。
仕様
| 項目 | 要求仕様 |
|---|---|
| 定常トルク | 10Nm 以上 |
| 瞬時最大トルク | 30Nm 以上 |
| トルク変動 | ±0.2Nm 以内 |
| 指令トルク分解能 | 0.02Nm 以下 |
| 項目 | 性能 |
|---|---|
| 最大反力 | 12Nm 以上 |
| 分解能 | 20bit 以上 |
部品構成
| 名称 | 数量 | 備考 |
|---|---|---|
| 反力装置 | 一式 | モーター、トルクセンサー付き |
| 反力発生部 | 1 | |
| 反力制御部 | 1 | |
| 取扱説明書 | 1 |
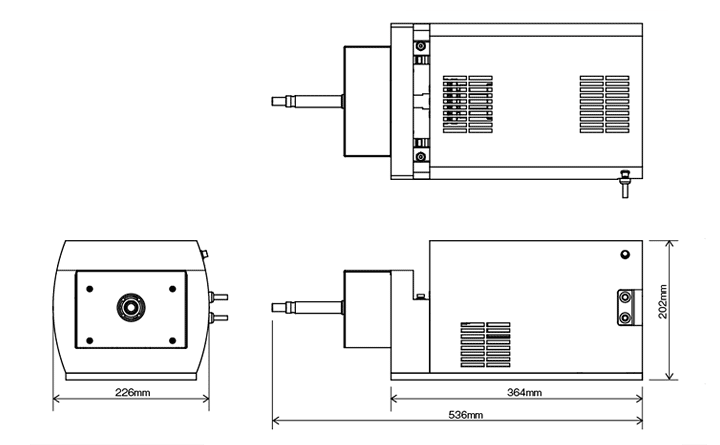
外形寸法図
製品に関してのお問い合わせ

関連製品のご紹介


ソリューション/製品に関してのお問い合わせ

